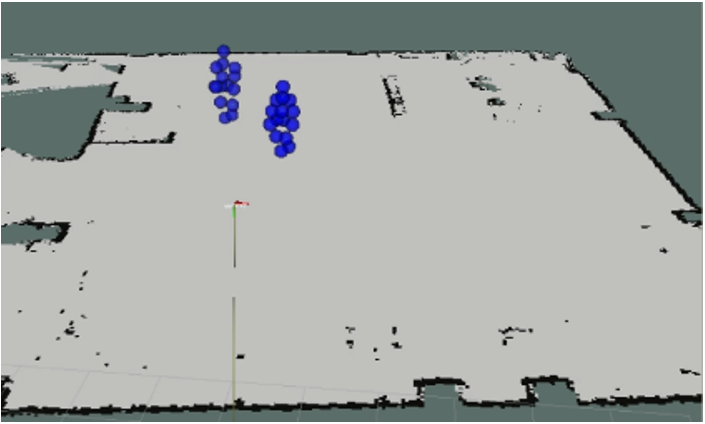
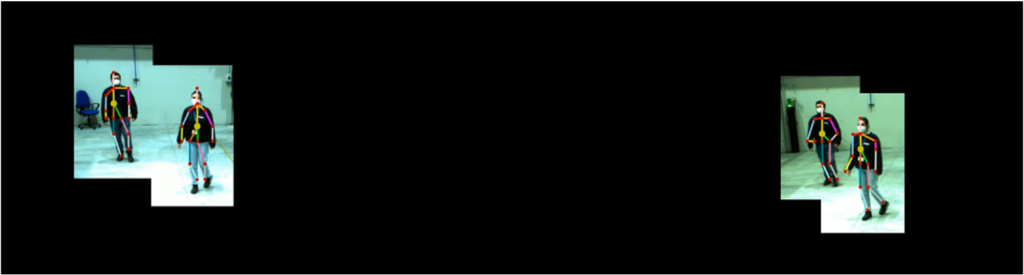
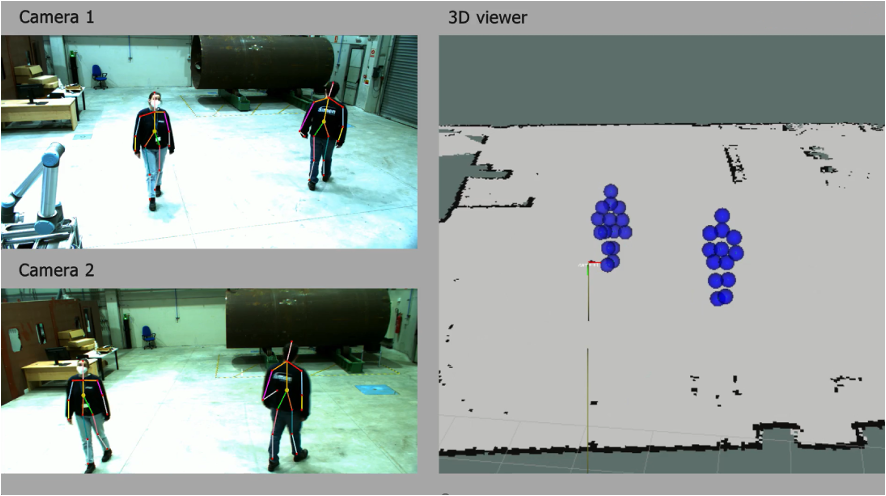
Person Detection & Tracking
The Person Detection & Tracking system is intended to monitor the shared spaces between humans and robots, as it allows to detect people and track them using stereo pairs, obtaining the pose of each person detected in the navigation map.